|
I am currently a Simulation Algorithm Engineer at Lightwheel AI, working since July 2025. M.S. in Computer Science | Tongji University | 2022 - 2025 B.S. in Computer Science and Technology | Shanghai University | 2018 - 2022 My research interests are computer vision, machine learning and multimodal generation, specifically, learning-based methods for 3D implicit representation, 3D Gaussian Splatting, Generation, etc. If you find any research interests that we might share, feel free to drop me an email. I am always open to potential collaborations. Email / CV / Github / Linkedin 中文 / English |

|
|
|

|
|
|
|
|
I am a simulation algorithm engineer at Lightwheel AI.
|
|
|
|
[07/2025] I have joined Lightwheel AI full-time as a Simulation Algorithm Engineer. [10/2024] I joined Lightwheel AI as an intern in simulation environment algorithms. [04/2024] I joined NIO's Environmental Perception Team as an Algorithm Intern. [01/2024] I have become an intern in the Data Computing department of the Artificial Intelligence Centre at haomo.ai. [12/2023] I have been on a research internship at Institute for Al Industry Research (AIR), Tsinghua University. |
|
Much of my research is about inferring the physical world (shape, motion, color, light, etc) from images and 3D raw data. Representative papers are highlighted. |
|
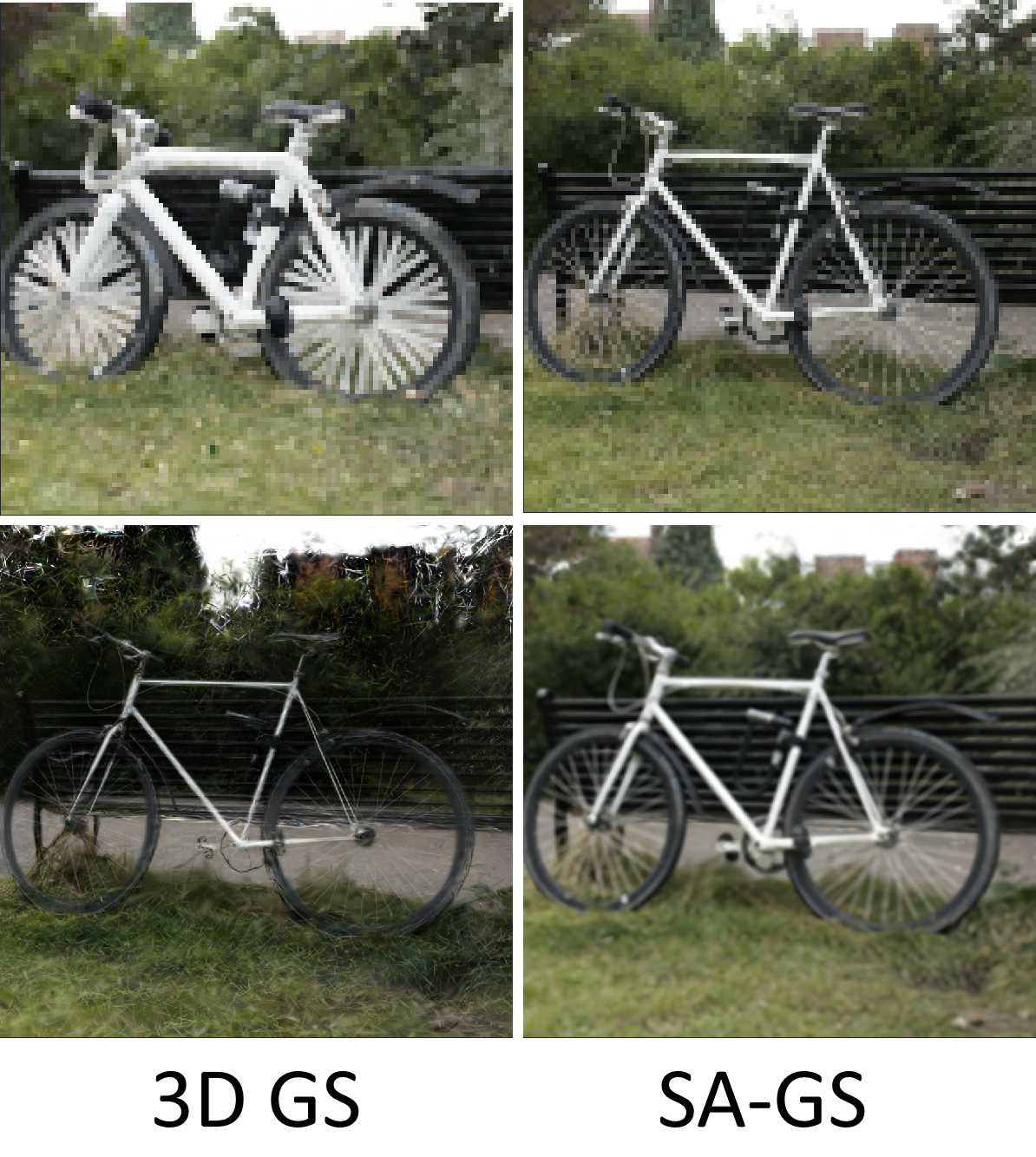
SA-GS: Scale-Adaptive Gaussian Splatting for Training-Free Anti-Aliasing
Xiaowei Song, Jv Zheng, Shiran Yuan, Huan-ang Gao, Jingwei Zhao, Xiang He, Weihao Gu, Hao Zhao 2024/03 Under Review [Project Page] [Code] A training-free approach that can be directly applied to the inference process of any pretrained 3DGS model to resolve its visual artefacts at drastically changed rendering settings. |
|
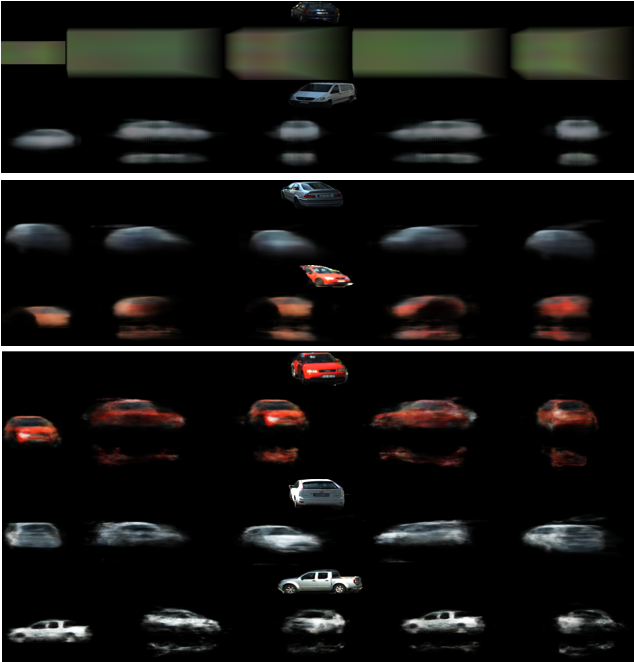
AutoRF Adaptation for KITTI360 Dataset
Xiaowei Song 2023/12 code(coming soon) Using AutoRF, I replicated its performance on the KITTI360 dataset. This involved data type loading, camera coordinate system conversion and NOCS spatial transformation. |
|
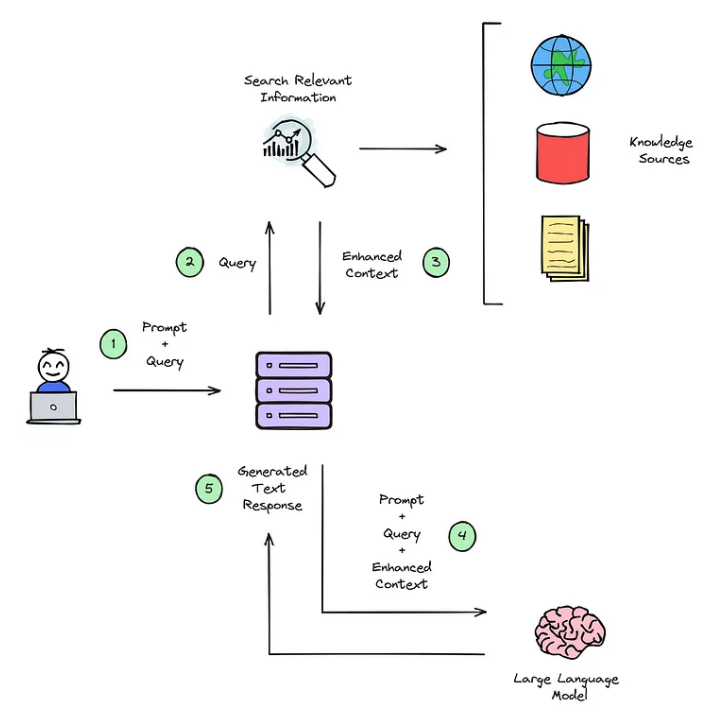
LLM Science Exam - Use LLMs to answer difficult science questions
Xiaowei Song, Xiaohan Yan, Nan Wang Kaggle, 2023/10 code We gather the wiki pedia knowledge about science questions to make it into a OpenBook Q&A question, then we make three Deberta models with different finetuning and combine their output features to infer the right answer. |
|
Stable Diffusion - Image to Prompts
Xiaowei Song, Xiaohan Yan, Nan Wang Kaggle, 2023/05 code We use a integration of ViT OFA and BLIP to make predictions on a dataset containing a wide variety of (prompt, image) pairs generated by Stable Diffusion 2.0. |

|
HUAWEIRobot planning for CodeCraft
Xiaowei Song, Xiaohan Yan, Nan Wang CodeCraft, 2023/04 code This project is about HUAWEI robots application, the project requires us to assign policies, control scheduling, and path planning for multiple robots in a single map. |
|
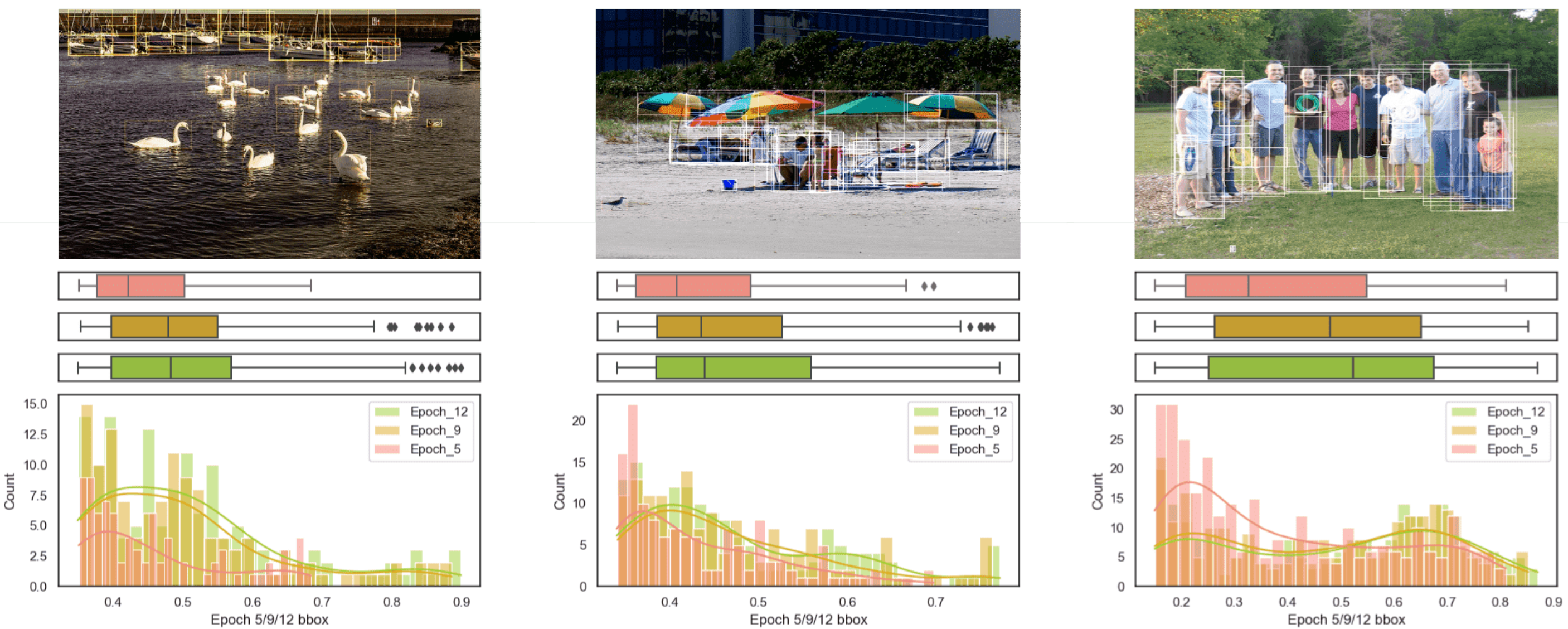
Research on Task-aligned Object Detection
Xiaowei Song Shanghai Excellent Graduation Design, 2022/04 code To study the problem of inconsistency between the regions of interest of the classification head and localization head for single-stage target detection. Propose (1) a training strategy for positive sample point regression frame center clustering and positive sample point semantic center weighting (2) a consistent optimization method for quadratic regression optimization frame quality. Eventually the proposed method outperformed the baseline in both accuracy and recall and became the SOTA for the task at that time. |
|
|
|
I led the team to win the second prize of the 19th Graduate Student Mathematical Modeling Contest in China. I like playing Soccer⚽ and I am a fan of Lionel Messi. badminton🏸, tennis🎾, frisbee🥏 and etc. |
| Last updated on 2023/12/18 |